Projects
. Visualization of Complex Network Sampling System(VCNSS)
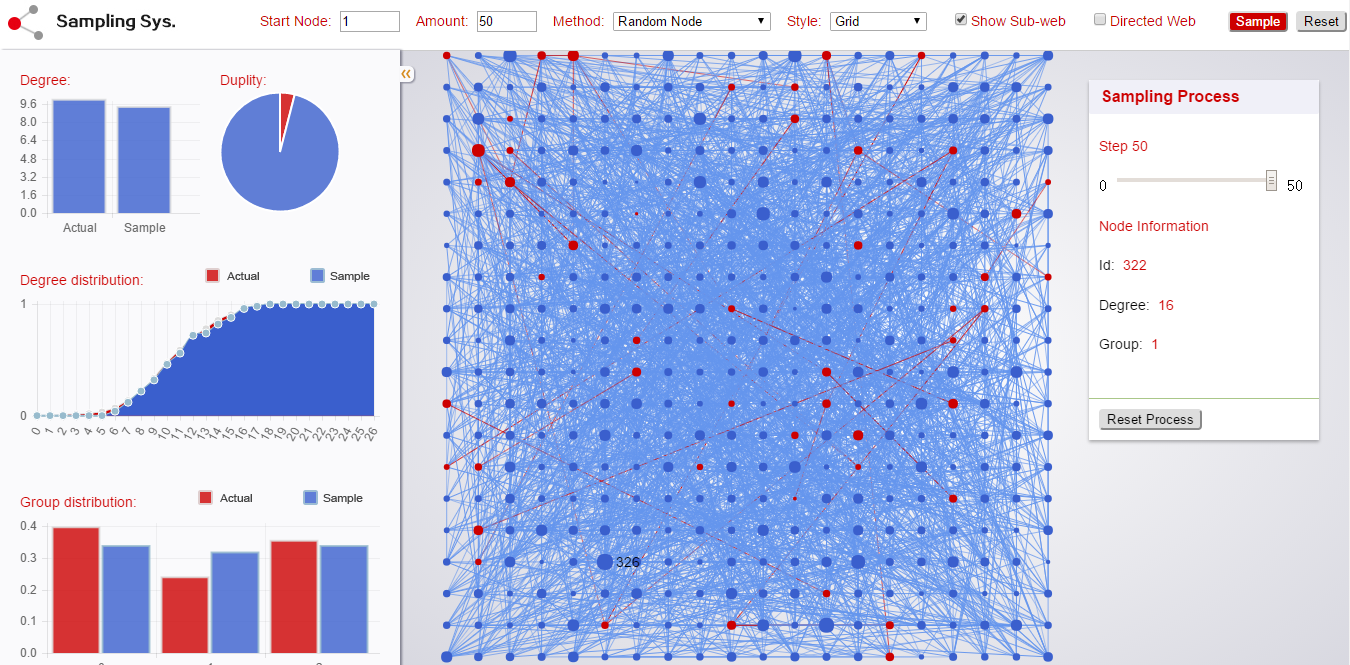
VCNSS is a system that people can operate various sampling methodologies to sample directed/undirected networks, and visualize the sampling outcomes in different layouts.
You can enter VCNSS here
Visualization of Complex Network Sampling System(VCNSS)
. Accelerated testing of Autonomous Vehicles

AGCBS is an online adaptive generation architecture for critical boundary driving scenarios. The whole system consists of four
parts, including naturalistic driving scenarios generation, scenario complexity model, intelligent driving test, and AGCBS
algorithm.
You can enter AGCBS here
Visualization of Adaptive Generation of Critical Boundary Scenarios(AGCBS)
. Scalable Evaluation Methods for Autonomous Vehicles
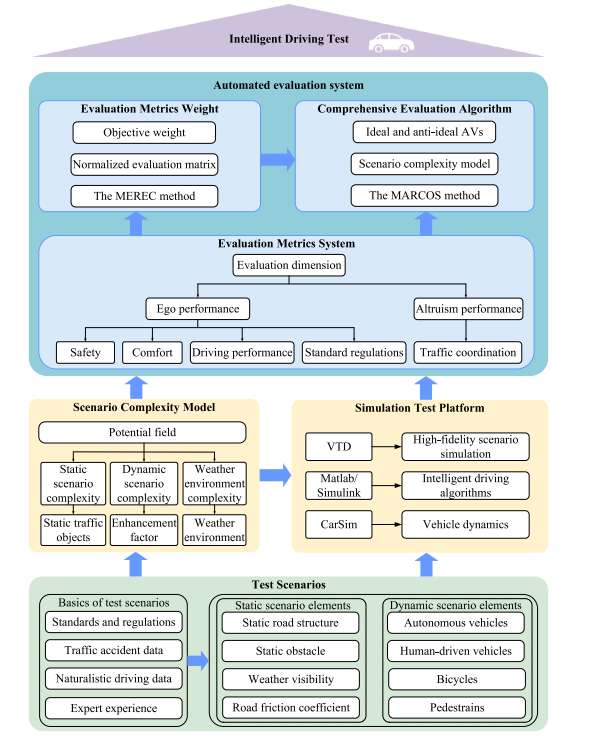
Effective intelligent driving test and evaluation methods can improve the development and deployment process of autonomous vehicles (AVs). However, due to the extreme complexity and high dimensionality of driving behavior, how to objectively and efficiently evaluate the multi-dimensional performance of AVs in simulation and real-world environments is a long-standing problem. This paper proposes an objective multi-dimensional comprehensive evaluation (OMDCE) method that divides the intelligent driving test into four modules: test scenarios, scenario complexity model, simulation test platform, and automated evaluation system.
The scenario complexity model is proposed to bridge the gap between the test scenarios and the automated evaluation
system, thus enabling adaptive scaling of the evaluation scale for test scenarios with different difficulty levels. Besides, based on the existing four evaluation metrics for ego performance, altruism performance
evaluation is first proposed to comprehensively portray AVs’ intelligence degree. The OMDCE method was evaluated by testing two different intelligent driving algorithms and conducting real vehicle testing. The
experimental results demonstrated that the OMDCE method can effectively evaluate AVs in various scenarios and quantitatively measure their multi-dimensional performance. The proposed method reduces the subjectivity of manual evaluation and speeds up the evaluation. Moreover, it improves the universality and scalability of the evaluation metrics system.
You can enter OMDCE here
Visualization of Objective Multi-dimensional Comprehensive Evaluation(OMDCE) System
. Power Battery Health Management and Abnormal Inference
Stable charging and discharging performance, along with sufficient stored energy, are essential for the reliable operation of new energy vehicle batteries.
As the total vehicle mileage increases, the battery will gradually age, leading to a decline in its charge/discharge capacity.
When the battery's capacity falls to 80% of its initial value, it is considered severely aged and requires replacement.
Therefore, it is crucial to study the available energy storage capacity of different types of batteries and understand the patterns of their decay. Constructing a deep learning neural network model to predict the state of health (SOH) of batteries is significant for enterprises. It enhances their vehicle management capabilities, provides early warnings of excessive battery capacity decay, and helps reduce vehicle maintenance costs.
. Multi-adversarial Testing and Retraining for Improving the Robustness of Autonomous Driving Policies
Autonomous vehicles, especially those based on deep reinforcement learning, are known for their susceptibility to the adversarial perturbations. To enhance their robustness, it is imperative to not only detect their decision errors through testing, but also fortify their robustness against these errors. This paper proposes an
iterative optimization method that trains multiple adversarial agents with varying adversarial intensities to identify decision errors in the driving vehicle and enhance its robustness by retraining to counteract these adversarial
agents. The effectiveness of the method is evaluated in a lane-changing scenario and the results demonstrate improved robustness of deep reinforcement learning based autonomous driving strategies compared to the adversarial reinforcement learning with a single adversary.
. Unsignalized Intersection Management Strategy for Mixed Autonomy Traffic Streams
This project comprehensively
considers the different traffic characteristics of CHVs, CAVs, and
HVs, and systemically investigates the unsignalized intersection
management strategy from the upper decision-making level to the
lower execution level.
. Design and Research of Evaluation System for Intelligent Vehicles, Automotive Industry Science and Technology Development Foundation of Shanghai
This project focuses on intelligent driving and autonomous parking in the last kilometer of closed park areas.
Utilizing data mining techniques for natural traffic flow analysis, the team has constructed 66 functional scenarios across 11 categories, totaling 558 specific scenarios.
These scenarios are evaluated based on four dimensions: safety, comfort, driving performance, and standardization, forming a framework for automated testing and evaluation of intelligent driving vehicles. A comprehensive automated evaluation system has been developed, integrating simulation data and evaluation criteria, with evaluation reports accessible through a web interface. Additionally, the project has expanded into on-road testing, leveraging scenario libraries, automated toolchains, and evaluation systems. Some outcomes, including the automated evaluation system, simulation testing toolchains, and automated testing techniques for intelligent driving vehicles in the last kilometer parking scenarios, have been internally adopted by SAIC Volkswagen.
Extensive objective and subjective tests on HAD/ADAS intelligent driving vehicles have demonstrated the effectiveness of the evaluation system in improving testing efficiency, accuracy, and reducing costs. Throughout the project development, two national invention patents have been jointly applied for, and four academic papers have been published collaboratively.
. Key Technologies of Real-time Intelligent Driving Test Based on Vehicle in the Loop, Shanghai intelligent network Automobile Technology Center Co., Ltd.
In order to accelerate autonomous driving testing and enhance the authenticity and diversity of testing, a comprehensive vehicle-in-the-loop simulation framework was developed for intelligent driving.
This project seamlessly integrates hardware and testing software. This integration enables research on automated testing and evaluation systems through real-world vehicle-in-the-loop testing.
. Research on Intelligent Driving Scenario Reconstruction Technology based on Digital Twins
This project focuses on the critical scenarios required in intelligent vehicle algorithm testing and shadow benchmarking technology, and realizes the reconstruction of critical scenarios based on map information and real vehicle sampling data.
Through machine learning and simulation technology, the project aims to reconstruct the critical scenarios encountered during the actual operation of the vehicle based on the map and real-vehicle sensory information in the simulation software (CARLA), and generate OpenDRIVE and OpenSCENARIO format files that can be reproduced again.